Calibrator
Calibrator
P/N: P/N:CALIBRATORRNDV1
Couldn't load pickup availability
Overview
Calibrator increases the value of your computer vision system. Uncertain and unreliable calibration results are a thing of the past, and your algorithms can perform their best. No more guessing if your calibration is actually accurate and reliable.
State of the Art Algorithms and Support
The software leverages years of research and expertise in the field of computer vision and industrial metrology. The algorithms are designed to operate on a sub-pixel level, fast and very robustly. State-of-the-art subpixel-localization for saddle points and circles yield the most accurate results possible. Robust optimization provides good results even with lower quality data or in the presence of outliers.
The experienced team at Calib.io will be available for support to assist you in obtaining the best result possible. 1 year of email support is included in perpetual licenses.



Licensing Options
The following license options are available:
| License Type | Description | Price Per License |
| Calibrator Trial | Free 14 day trial license for evaluation. One machine activation. Company email address required. | 0 EUR |
| Calibrator Research & Dev | Single machine, perpetual license. For internal research and development use only. Transferable within licensee organisation. 14-day money back guarantee. |
550 EUR |
| Calibrator Commercial | Single machine, perpetual license. May be used to calibrate commercial products for sale. Transferable within licensee organisation. | 2000 EUR |
| Calibrator Academic | Single machine, perpetual license for academic users. Commercial use not permitted. | 150 EUR (Limited Time Offer) |
| libCalib | C++ library (C++11 and later) to embed into your software. Perpetual, named user developer licenses. | Ask for quote |
Per-machine licenses can be transferred to other machines in the possession of the license holder (individual or company). For details on Calibrator licensing, see our EULA. After purchase a download link and license key is sent within 24 hours via email.
(*) Licensee will be eligible for 1 year email support from date of purchase. Support requests must be sent from license email address.
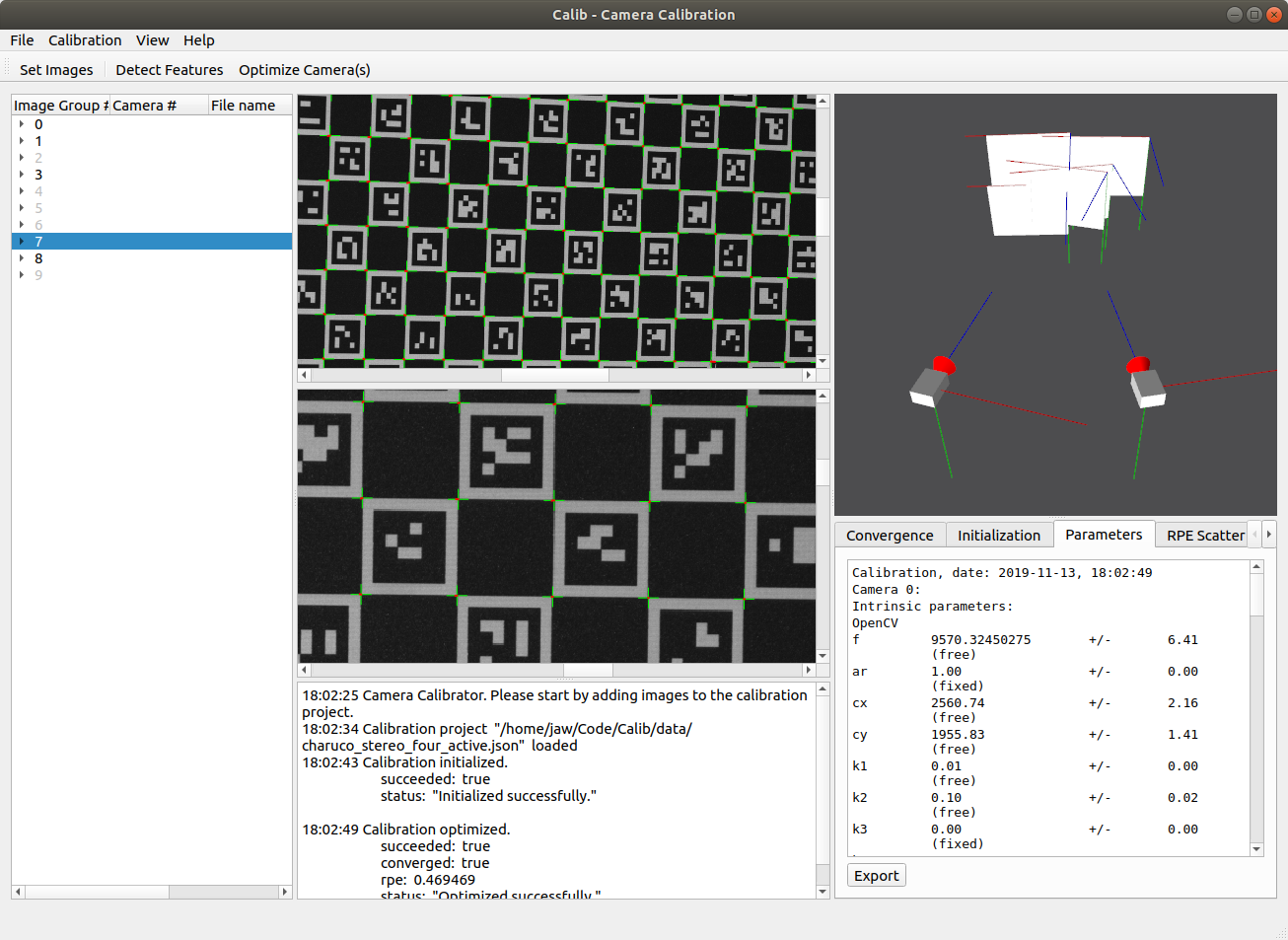
Calibrate Multi-Camera Setups
The software supports simultaneous calibration of multi-camera systems. The calibration is performed by non-linear bundle adjustment where parameters for all observations are estimated at the same time using state of the art optimization methods.
Use Multiple Targets for Large FOVs
When calibrating large fields of view (FOV), e.g. outdoors or for large scale metrology, calibration targets typically need to be very large. Calib has the unique feature of allowing calibration with a network of ChAruCo, Kalibr, or AruCo marker targets. This is similar to the self-calibration approach used in photogrammetry, but does not have the same limitations (self-calibration has strict requirements for camera numbers and orientations to converge and needs additional data to determine focal lengths).
Supports Many Calibration Targets
The software supports the following target designs:
- Checkerboard Marker
- ChAruCo
- Kalibr's AprilGrid Targets
- Regular Checkerboard
- Regular Circle Grid
- Asymmetric Circle Grid
- AruCo Targets
For most calibration setups, we recommend Checkerboard Marker, ChArUco, or AprilGrid targets. We are also able to make individual target design or feature additions based on a consultancy agreement (contact us at sales@calib.io to discuss this option).
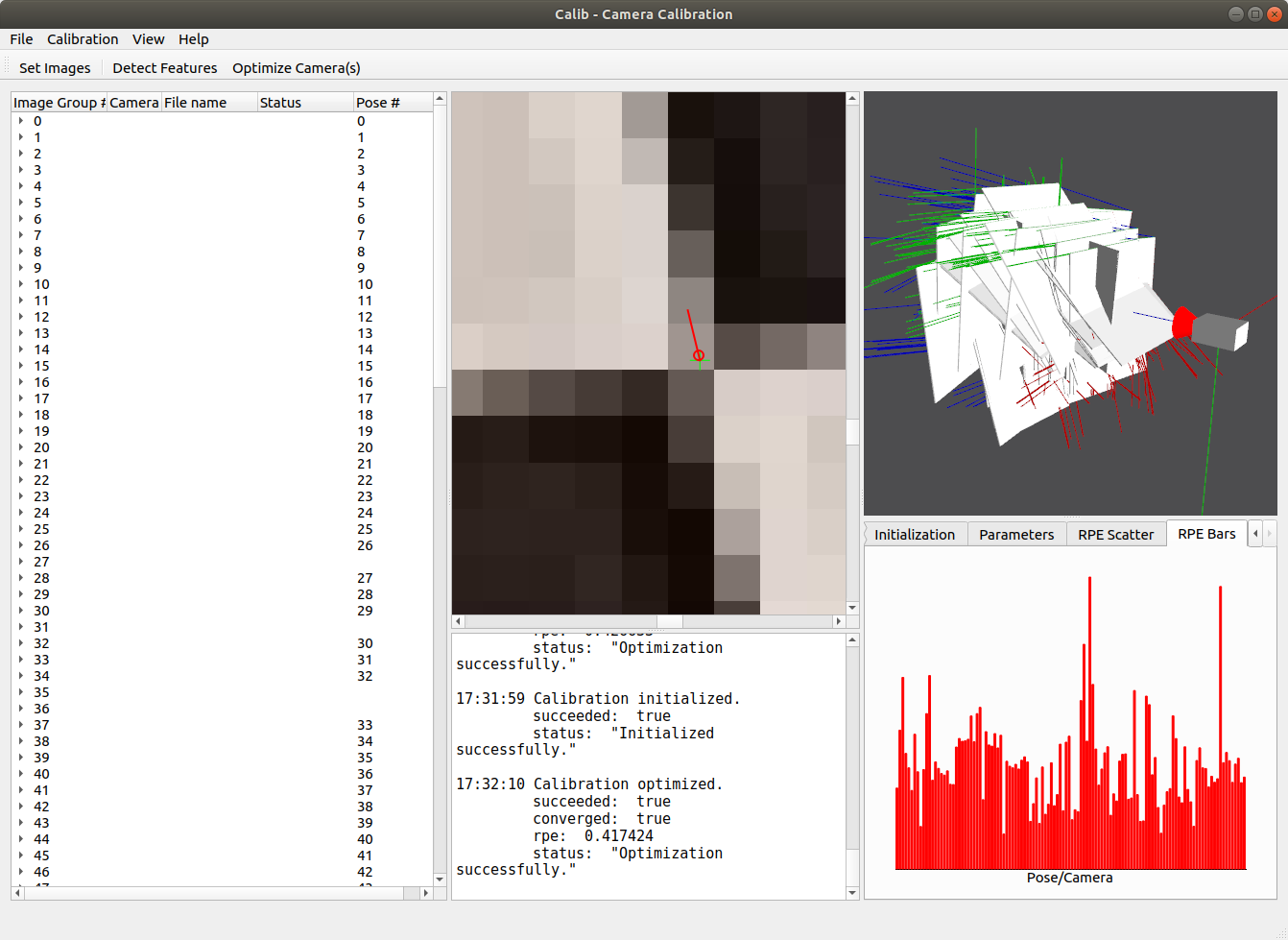
Covariance Analysis
A unique feature of Calibrator is the ability to see how a particular calibration will perform in a real world setting in terms of triangulation accuracy and projection uncertainty. These are the parameters that users really need in order to assess calibration quality. They allow for comparing the performance of various different camera models and parameter choices, and are used as go/no-go criteria by many customers. Learn more about covariance analysis here.
Features
- Accurate intrinsic and extrinsic camera calibration with a number of configurable camera/lens models.
- OpenCV's 18-parameter camera model based on Brown/Conrady. Individual parameters can be turned on/off.
- OpenCV's fisheye camera model based on Brandt/Kannala.
- Double Sphere camera model by Usenko et al.
- Enhanced Unified camera model by Khomutenko et al.
- Calib.io's highly accurate B-Spline camera model.
- Halcon's Division model for perspective cameras.
- FOV camera model of Devernay/Faugeras.
- Thin Prism model of Weng.
- Camera models can be exported as "undistortion maps" and "unprojection maps" for very fast projection/unprojection and compatibility with a wide variety of software frameworks.
- Robust parameter optimization with Huber-norm loss and non-monotonic trust-region search.
- Supports N camera stereo calibration with joint bundled adjustment optimization.
- Supports M calibration targets (ChAruCo or Kalibr targets) to cover larger FOVs.
- Optimizes target geometry (object points) to obtain very low reprojection errors as low as 0.01px.
- Detection of many calibration target types with improved subpixel localisation, yielding more accurate and robust localization than OpenCV.
- Advanced robust Fisheye initialization.
- Comprehensive analysis tools for assessing quality of calibration.
- Per-camera, per-pose and per-feature RPE statistics (RMS, mean, median).
- Covariance estimation and parameter correlation analysis.
- Simulation of triangulation error distribution.
- Statistical normality tests (Henze-Zirkler).
- Statistical independence tests (distance correlation).
- Visualisations of residual directions and magnitudes over the image plane.
- Available as GUI desktop software or shared object library (C++).
- Cross Platform: we currently support Windows 10+ and Linux (x64 architecture).
See in-application Help Browser for detailed feature descriptions.
Include In Your Own Product
The calibration capabilities of Calibrator are also available as libCalib, a C++ library that can be embedded into your product. Using libCalib requires developer licenses, but the runtime license can be deployed on an unlimited number of machines.
For the various licensing options please contact sales@calib.io for more information.
Constantly Evolving
Calib is the most comprehensive software for geometric camera calibration on the market. However, we regularly add features and provide updates. As a licensee, you can post and vote on future additions. Click here to see our current roadmap.
14 Day Money Back Guarantee
We offer a money back guarantee (minus 3% payment fee) for Calibrator R&D licenses within 14 days from fulfillment. During this period, our dedicated email support team is available to assist you with your initial calibration, ensuring a smooth start and addressing any issues you may encounter.